- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
海洋环境地磁场三分量测量仪的设计与实现
录入:edatop.com 点击:
一、项目概述
1.1 项目摘要
提出了一种利用安装在舰船上的三分量磁传感器进行地磁场测量的构想,解决了在任意的舰船姿态下,消除测量中舰船磁场干扰的问题。该测试仪采用地磁模块来测量磁场的三分量值,采用3轴陀螺仪来进行任意的舰船姿态所包含的横摇,纵摇和航向三种状态信息,对采集到的数据进行计算,从而得到地磁场的三分量值。同时 该模块还包含压力传感器和温度传感器,可以实时检测海面上的气压以及温度情况。
1.2 项目背景/选题动机
"测地磁消舰磁"是舰载消磁系统所采用的消磁方法,如果能预先测量出舰船航行海域的地磁场值并建立数据库,那么舰船在航行的过程中就可以根据当地的地磁场值来进行消磁系统的电流调整,从而改善舰载消磁系统的控制方法。
目前,地磁场数据的获得主要是通过建立地磁模式组的方法。国际地磁学与高空大气物理协会的一个专门小组每5年公布一次国际地磁参考场,我国则每10年出版一次中国地磁图。这2种地磁场模型的建立,其数据大多来自陆地上的地磁台站,而海洋上的特定地点的地球磁场还受当地的地理构造等诸多因素的影响而具特殊性。这就导致了全球地磁场模型和局部地磁场模型都不能及时准确地描述海洋地磁场。因此,用于舰载消磁系统的电流调整时造成的误差比较大。为了更准确地获得海洋上特定地点的地磁场值,可以在海洋上进行实地测量。
目前在海洋上进行的磁场测量主要是获得磁场总量,但在舰载消磁系统进行跨纬度调整等应用中,需要的却是三分量的地磁场。磁场的三分量值可以利用安装在舰船桅杆上的6轴地磁模块进行测量,但这样测得的磁场值并不是地磁场值,而是一个包含了舰船本身磁场和传感器自身干扰的复杂的磁场值,并且受舰船姿态的影响,其值也是变化的,因此可以利用3轴陀螺仪来测量舰船的3个姿态角,再通过数学建模的方法,从一个复杂的三分量磁场值中分离出地球磁场。
二、需求分析
2.1 功能要求
1, LPR430AL轴陀螺仪(横滚,俯仰)能够检测舰船横摇,纵摇信息并输出,LY330ALH陀螺仪(偏航)能够检测舰船航向角度并输出。
2, LSM303DLH地磁模块能够检测到舰船所在处地磁场信息输出。
3, 最终输出信息还包括经过去除固定干扰之后的地磁场信息。
4, 压力传感器和温度传感器能够实时检测海面上的温度和气压,并输出。
2.2 性能标准
最后经过软件计算结果,地磁场的水平分量和垂直分量的误差不超过50nT,磁偏角误差不超过0.3°。
三、方案设计
3.1 系统功能实现原理(除图片外需有文字介绍)
磁传感数学模型分析
对于装在测量船上的磁传感器来说,其接收的磁场值为:
 (1)
(1)
式中:E为单位矩阵;K为感应磁化系数矩阵; 分别为地磁场水平分量和垂直分量;A为任意姿态下测量船坐标系与地磁坐标系的转换矩阵;向量 为各种固定干扰量的合成。矩阵A各元素表达式分别为:
分别为地磁场水平分量和垂直分量;A为任意姿态下测量船坐标系与地磁坐标系的转换矩阵;向量 为各种固定干扰量的合成。矩阵A各元素表达式分别为:
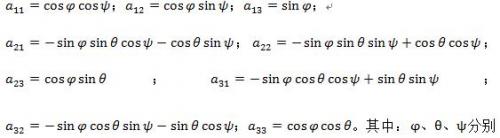
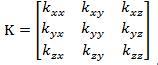
为测量船的纵倾角、横摇角和磁偏向角。矩阵K可以具体表示为:
分析(1)式可以知道,要测量的量 `
` `
` (实际上要测量的是磁偏角,只是测量出磁航向角 后,就可以与导航设备提供的航向角做差求出磁偏角),向量h是可以从磁传感器中直接读出的
(实际上要测量的是磁偏角,只是测量出磁航向角 后,就可以与导航设备提供的航向角做差求出磁偏角),向量h是可以从磁传感器中直接读出的 , 首先应该测量出感应磁化系数矩阵K和固定干扰向量
, 首先应该测量出感应磁化系数矩阵K和固定干扰向量 。
。
2.海上任意地点`![]() ` 的求解
` 的求解
上一篇:基于电磁感应的液体粘度测量方法研究
下一篇:莱特波特无线终端测试解决方案