- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
基于SABER软件的数字控制电源系统的仿真设计
录入:edatop.com 点击:
1. 引言
随着数字信号处理技术的飞速发展,数字控制由于其控制理论与实施手段的不断完善,并且具有高度集成化控制电路、精确的控制精度,以及稳定的工作性能、良好的设计沿继性等优点,如今已成为电力电子学的一个重要研究方向。基于数字控制的电力电子装置具有较好的系统性能并已得到了广泛应用;而且数字控制也是最终实现电源模块化、集成化、数字化、绿色化的有效手段。
为了高效快捷地完成电源系统的设计,计算机仿真是重要方法之一。计算机仿真指的是利用计算机软件建立虚拟模型对所研究的系统进行实验的过程。[1]由于不受实际的实验条件的制约,因此大大节省了硬件耗费,缩短了开发周期。通过仿真可以很方便地进行电路设计,原理分析,控制方案选择以及参数整定等等。在对数字控制电源系统进行仿真时,由于数字控制系统的闭环是通过对数字处理器编程实现的,而数字控制方案大多是由模拟方法演变而来,因此,通常的方法是将数字控制方案还原成模拟方案,再采取模拟器件搭建闭环系统,完成闭环仿真。但是数字控制系统的仿真不同于模拟系统的仿真,首先,数字处理器对数据的处理是离散化的;其次,数字处理器并非实时的控制,而是有其自己的工作节拍;另外,模数接口部分对仿真结果具有一定程度的影响,因此只有认清数字控制与模拟控制二者之间的差别,在建模过程中,使模型与实际系统尽量接近,才可能取得满意的效果。
本文详细分析了数字控制系统的工作特点,并提出一种适用于数字控制电源系统的建模仿真方法。由于该仿真模型更贴近于实际的数字控制系统,因此可以用于数字系统的原理分析和参数整定等,具有重要的参考价值。
2. 数字控制电源系统的原理与特点
对于一个典型的数字信号处理系统,通常都是采用如图 1所示的系统结构。在自然界中大量的信号是模拟信号,所以数字信号处理系统一般输入为模拟信号xa(t);模拟信号xa(t)经过抽样处理得到离散信号xa(n),再经A/D量化得数字信号x(n),输入到数字处理单元;经数字处理后输入数字信号x(n)变换成输出数字信号y(n);输出数字信号y(n)再经过D/A变换和平滑滤波得到模拟信号ya(t)输出。

图 1 典型的数字信号处理系统的系统结构
数字控制电源系统一般由两部分组成,一部分为数字处理器,另一部分为被控对象。数字处理器为离散部分,被控对象为连续部分,或者分别称为数字部分和模拟部分。[2]若要实现数字处理器对被控对象的控制,首先必须通过处理器内部或外部扩展的AD功能模块以一定的采样频率对系统的模拟输出量进行采样,将该连续信号转化为离散的数字信号,再经过量化后转变为数字量,用于处理器内部的运算。而模拟控制系统的采样是实时的,连续的。在数据处理上,数字处理器对数据的处理是离散化的,数字处理器仅对各离散的采样值进行处理,而连续系统是基于连续信号的。随着电源功能的逐步完善,数字处理器除了完成控制功能以外,还要能够实现保护、显示以及远程监控等各种功能。随着功能的增多,所需要的处理时间就会相应地增长,因此处理器的核心算法的处理频率受到一定的限制,一般核心算法的处理频率会小于电源的开关频率,这使得数字控制难以做到实时控制。此外,为了实现对连续被控对象的控制,处理器内部计算结果的离散化输出必须转化为连续信号。对于数字控制开关电源系统,数字处理器的输出环节一般为内部或外部扩展的PWM功能模块,它具有零阶保持的功能,即在下一次输出更新之前始终保持本次输出值。
3. 数字控制电源系统的仿真模型设计
3.1 离散化的仿真处理方法
由于数字控制系统由数字处理器和控制对象组成,而它们分别属于数字部分和模拟部分,因此要对这两部分分别建立仿真模型,然后再结合在一起进行仿真。[2]
模拟部分的建模较为简单,只需用仿真软件中提供的模拟器件搭建好电路即可。数字控制部分相对而言复杂一些,需要考虑数模接口和数据处理两部分。其中数模接口分为AD采样和DA转换,它们实现了功率部分和控制部分之间的接口。在对控制系统进行分析时,可以把AD采样看成一个理想开关与一个比例项的串联,它实现了连续域到离散域的转换,在仿真中可以由模数转换接口“a2z”来实现。DA转换具有零阶保持功能,完成离散域到连续域的转换。对于数字控制开关电源系统,数模转换常常由数字处理器的PWM功能模块代替。因此可以根据数字处理器内部PWM信号产生的机理,将计算得到控制量与一个固定开关频率的三角载波相交截,从而得到PWM驱动信号。[3]最终可以得到数字控制电源的控制系统框图,如图2所示。其中Hm(s)是采样电路的等效比例环节;Vref是数字处理器内部给定的电压基准;S1是等效开关,完成连续到离散的转换;Gc(s)是数字处理环节,这里采用PI算法;zoh是PWM输出环节等效的零阶保持器;Gud(s)是功率电路的输出电压与占空比之间的控制传递函数。
[p] [p] 4 数字控制系统仿真实例
本仿真实例的主电路采用同步整流有源箝位正激变换器,控制方法为电压单环控制。系统结构见图4所示。Vin为输入直流电压,S1和S2分别为正激变换器的主管和箝位管,Cc为箝位电容,Tr为变压器,SR1和SR2为变换器副边的同步管,Lf和Cf组成输出滤波环节,Ro为电阻负载。当S1和SR1导通时,能量从原边传递到副边,经过整流、滤波后得到直流输出电压;当S2和SR2导通时,变压器通过箝位电容实现磁复位,副边经过SR2续流。数字处理器对输出电压进行采样,根据内部提供的电压基准进行电压环调节,电压环的输出改变PWM驱动信号的占空比,从而改变四个开关管的导通时间,最终使输出电压稳定。
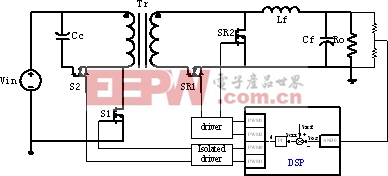
图4 系统结构图
下面是采用Saber软件实现的建模仿真过程。主要参数如下:输入为48VDC,输出为3.3V/20A,开关频率为300KHz,DSP的采样频率为50KHz,所选用DSP芯片的工作频率为32MHz。
主电路部分采用仿真库中的模拟元器件构成。输入为48V直流电压源,主管S1和箝位管S2及副边两同步管均为理想的N沟道MOSFET,箝位电容Cc为2.2uF,变压器匝比为4:1,滤波电感为1uH,滤波电容为300uF。控制部分的离散化仿真模型可以根据图2和图3所给出的框图得到。首先,AD采样环节由一个模数转换接口“a2z”实现。电压基准为一个Z域给定信号。以上两者的差值为误差项。然后分别由Z域的增益、加法器、比较器(用于积分限幅)和延迟等元件按照图3中的连接方法构成整个PI计算环节。最后,将PI计算的输出分别增加和减少一个微小量后与一个频率为300KHz的三角波相交截,产生带有死区的PWM互补输出,经过数模转换接口“z2a”后变成电压值,再通过压控电压源实现两路信号的放大和电气隔离,而后分别作为主电路中变压器原边主管与箝位管以及副边两同步管的驱动信号。电源系统的整体仿真电路图见图5所示。仿真电路中除增益之外的大多数Z域元件都需要一个Z域采样脉冲信号进行控制,本例中采样频率设为50KHz。另外,三角波发生器由一个Z域脉冲源实现,它的控制信号频率应为DSP芯片的工作频率32MHz,输出的三角波频率为300KHz。
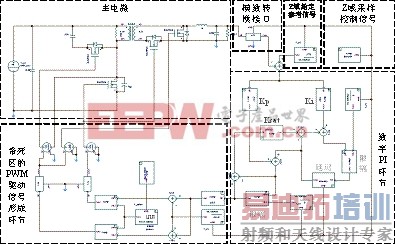
图5 数字控制模块电源仿真电路
[p] 通过调整电压环PI控制参数,获得稳态仿真波形见图6所示。波形自上向下依次为主管驱动、箝位管驱动、输出电压和占空比信号(即PI环输出)。从图中可以看出两驱动信号互补,并存在一定的死区时间,输出电压稳定在3.3V,纹波电压峰峰值为0.012V,PI环输出稳定。从占空比的波形上可以看出,占空比更新一次的时间为6个开关周期,即1个采样周期,这与实际的数字控制系统完全相符。图7给出了动态仿真波形,波形从上到下分别为卸载控制信号、满载到半载突卸时输出电压波形、加载控制信号和半载到满载突增时输出电压波形。
图6 稳态仿真波形
图7 动态仿真波形
将仿真获得的控制参数应用于原理样机,经过实验反复调试,得出一组较好的实际控制参数,见表 1。通过比较可以看出仿真参数与实际参数相差甚微,这有力地说明了该建模仿真方法对于控制参数整定具有重要参考价值。
表1 PI控制参数
PI参数 | 仿真参数 | 实际参数 |
Kp | 0.2 | 0.195 |
Ki | 0.1 | 0.003 |
Ksat | 0.015 | 0.015 |
从以上的论述和仿真可以看出这种数字控制系统的建模仿真方法很好地模拟了数字处理器内部数据处理的过程。它不仅可以用于原理性分析,而且对于数字控制系统的控制参数整定具有重要的参考价值。
5 结束语
本文在详细地分析数字处理器内部数据处理的机理的基础上,引入一种数字控制系统的建模仿真方法,并通过具体的实例演示了整个建模仿真过程,经过仿真分析验证了这种方法可以很真实地体现数字控制系统的数据处理过程,充分体现了数字控制的特点,它将为数字控制系统的控制参数整定和数字控制算法研究创造有利的条件。
参考文献:
[1]陈建业. 电力电子电路的计算机仿真. 北京:清华大学出版社,2003年10月
[2]张绍宁. 数字控制系统仿真方法. 战术导弹技术,2002年7月
[3]David M. Van de Sype, Koen De Gusseme, Alex P. Van den Bossche, and Jan A. Melkebeek. “Small-signal z-domain analysis of digitally controlled converters”. PESC 04. 2004 IEEE 35th Annual. pp. 4299~4305.
[4]赖寿宏. 微型计算机控制技术. 北京:机械工业出版社,2001年5月
[5]李春艳. 基于DSP的电源控制. 南京航空航天大学硕士学位论文,2003年
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>