- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
高速公路汽车追尾预警系统设计
录入:edatop.com 点击:
摘要 针对高速公路汽车追尾预警系统进行了总体结构设计,将系统分为主控模块、信息处理模块、电源模块、报警模块、制动模块、存储模块以及通信模块7个部分。从硬件的角度对各个模块进行了功能分析、器件的选型。最终从软件的角度,对整个流程进行了设计。设计该系统以期达到降低交通事故发生率,体现经济性和实用性原则。
关键词 高速公路;汽车追尾;预警系统
汽车改变了人类的生活方式,给人们的生产生活带来了巨大的便利,推动了社会的进步。随着汽车数量的增多,道路交通事故越来越多,给家庭和公共财产造成了巨大损失。据统计,全世界每年有70万人死于道路交通事故,1 000~1 500万人在交通事故中受伤,平均每5分钟就有1人死于车祸,每1分钟就有1人因车祸导致伤残。如果能在交通事故发生之前,提醒汽车驾驶员并采取相应的措施,那么交通事故将大幅减少。因此,文中对高速公路中的汽车行驶状况进行了研究,设计了一套高速公路汽车追尾预警系统,以期减少交通事故。
1 系统总体结构设计
高速公路汽车追尾预警系统总体结构如图1所示。该系统主要包括7大模块:主控模块、电源模块、信息处理模块、通信模块、报警模块、制动模块和存储模块。
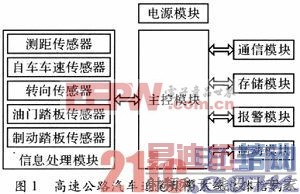
该系统的工作原理是:测距传感器安装在汽车前保险杠上,负责与前车之间距离和相对速度的测量;转向传感器负责监测是否处于转向状态;油门踏板传感器负责检测驾驶员有没有松开油门;制动踏板传感器负责监测驾驶员是否踩下刹车系统;传感器采集到的信息统一传送给信息处理模块,信息处理模块做完相应的数据处理后,通过CAN总线传给主控模块。主控模块根据传送来的信息,判断自车是否处于安全行驶距离内。如果处于安全状态,则在报警界面实时显示车速和车距;如果处于不安全状态,则通过报警系统发出警报,提醒驾驶员采取相应措施。系统采用2次报警,分别是提醒报警和危险报警。当自车与前方车辆之间的距离大于提醒报警距离时,系统不报警;当自车与前方车辆之间的距离小于提醒报警距离而大于危险距离时,发出警报提醒驾驶员松开油门;当自车与前方车辆之间的距离小于危险报警距离时,系统自动启动制动系统,强制刹车。通信模块负责与其他设备之间的信息交换;存储模块负责存储自车行驶状态等信息;电源模块负责不同电源之间的转换,给所有模块供电。
2 系统硬件设计
2.1 主控模块
主控模块是系统的核心,主要负责向信息处理模块发送和接收数据采集指令,根据传送来的信息判断自车是否处于安全状态,并向报警模块发出相应的信息。
系统采用美国Atmel公司的低功耗AVR微处理器芯片ATmega128L。它的特点是最高工作频率可达16 MHz,具有128 kB Flash内部存储器、4 kB EEPROM和4 kB SRAM数据存储空间,同时还可以扩展外部存储器,具有8个10位ADC通道、2个8位和2个16位硬件定时/计数器,并可在多种不同的模式下工作;此外,它还有8个PWM通道,可编程看门狗定时器和片上振荡器,片上模拟比较器,UART,SPI,I2C总线接口,TAG口为开发和调试提供了方便的接口。
2.2 信息处理模块
2.2.1 测距传感器
测距传感器用于确定自车与前方车辆之间的距离、自车与前方车辆之间的相对速度。为实现这一目的,系统采用德国ADC公司生产的毫米波雷达传感器,型号为ARS100—3。该传感器具有3根可动天线,发出3束雷达;发射频率76~77 GHz;平均发射功率200μW;探测距离7~150 m;距离分辨率为1 m;相对速度-50~+200 km/h;速度分辨率为1 km/h;正常功率18 W,最大功率25 W;工作温度-25~+70℃;启动电压10~18 V。
2.2.2 车速传感器
自车的转速可以通过转速传感器测得。霍尔传感器具有灵敏度高、精度高、体积小、抗干扰能力强等特点。系统选用CSHG-06霍尔效应转速传感器。它的主要特性是固定的旋进长度;测量低频信号;温度范围宽;防止短路和反磁性保护;工作电压8~36 V;固定旋进长度0.5 mm;工作温度-40~+120℃。
2.2.3 转向传感器
车辆在转弯时,雷达会把道路两旁的路障或隔离物当作目标,从而做出危险判断,发出警报。为抑制这种情况系统采用型号为GC03-SP3000的转向传感器。该传感器的主要特性是:寿命长;机械角度87°,电气角度45°;适合汽车,农业设备等场合使用。
2.2.4 油门踏板传感器和制动踏板传感器
油门踏板传感器用于检测在警报发生时,驾驶员是否松开了油门,以此判断是否对警报进行抑制。为实现这一目的,只需监测油门踏板的压力变化即可。
制动踏板传感器用于检测在警报发生时,驾驶员是否踩下了刹车系统,以此判断是否对警报进行抑制。与油门踏板传感器类似,只需要监测制动踏板上的压力变化即可。
系统统一采用HT—PD压力传感器对油门踏板和制动踏板上的压力进行检测。该传感器的主要特性是:结构紧凑、重量轻;高抗冲击和振动能力;高IP防护能力;可靠性、稳定性高。
2.3 报警模块
当主控模块通过信息处理模块传送的数据判断出车辆处于危险状态时,则通过报警模块向驾驶员发出警报。报警模块由红、黄、绿3个发光二极管、一个蜂鸣器、一块AM160160—34D57液晶显示器组成。当车辆处于安全状态时,绿色二极管点亮;当系统发出提醒警报时,黄灯亮,蜂鸣器间隔呜叫;当系统发出危险警报时,红灯亮,同时蜂鸣器一直鸣叫。液晶显示器用于显示车辆当前行驶速度和车距。
2.4 制动模块
当危险警报发生时,由于某些原因,驾驶员可能没能及时刹车,因此需要系统强制启动刹车系统。当警报发生时,利用制动踏板上的压力传感器,可以知道驾驶员是否进行了刹车。如果驾驶员未及时刹车,则由主控模块控制电磁换向阀的移动,改变油压,强制启动刹车系统。[p]
2.5 电源模块
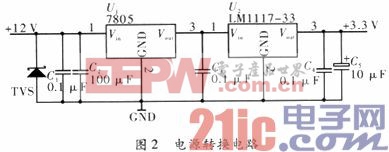
电源模块负责给所有模块供电。ATmega128L的工作电压为2.7~5.5 V,ARS100—3的工作电压为10~18 V,外围电路工作电压为3.3 V,汽车蓄电池的电压为12 V,系统最佳工作电压为3.3 V,因此需要将12 V电压转换为3.3 V。可以通过三端固定式集成稳压芯片W7805和三端可调正稳压器集成电路LM117~33实现。电源转换电路如图2所示。
3 软件设计
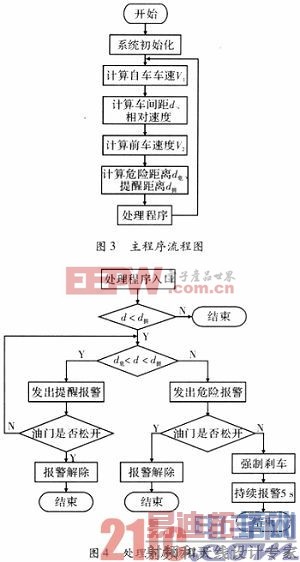
系统软件采用汇编语言与C语言混合编程的方式,汇编语言用于系统启动和初始化程序的编写,计算、判断、处理等程序采用C语言完成。系统主要包括主程序、初始化程序、相对距离和相对速度子程序、确定防撞模型子程序、处理子程序。主程序负责系统的启动、初始化、根据具体情况调用相应子程序。相对距离和相对速度子程序用于确定自车和前方车辆之间的相对距离和相对速度。确定防撞模型子程序根据计算出的相对距离确定合适的防撞模型公式,计算出提醒距离和危险距离。处理子程序根据相对距离、提醒距离、危险距离确定自车当前状态,采取相应措施。图3和图4分别是主程序和处理程序的流程图。
4 结束语
文中结合高速公路交通事故频发的现状,设计了一套高速公路汽车追尾预警系统,该系统能够有效降低交通事故的发生率。当然,能够实现这一目的的方法有多种,但由于经济成本过高,增加了车主的负担。文中采用低功耗的AVR单片机做主控芯片,成本低廉,体现了经济性和实用性的原则。
射频工程师养成培训教程套装,助您快速成为一名优秀射频工程师...
射频和天线工程师培训课程详情>>