- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
靶场微波成像雷达技术
录入:edatop.com 点击:
靶场微波成像雷达技术
张华生
(零八一总厂 广元 628017)
【摘要】兵器在恶劣环境下战术技术性能的迅速提高和电子信息技术的飞速发展,要求试验靶场具有相应的检测设备。特别是检测分析高速(V≥6 Ma)、小雷达反射截面积(σ≈0.1m2)、超低空(H≤10m)、多兵器(n≥8)目标所需设备的电气性能指标非常高,一般技术手段难以完成任务。成像雷达由于其独特的高精度测量性能受到雷达界的高度重视,本文在分析关键技术后,进行了微波成像雷达工程仿真。结果表明,成像雷达能满足靶场的使用要求。
【关键词】 微波成像,ADBF,工程仿真
1 引言
国外成像雷达的研制已经有几十年历史,成像方法较多(毫米波成像、微波成像)。由于技术复杂设备十分庞大以及费用很高等诸方面原因,虽也有一些应用,但十分有限。近年来,在美国军方支持下,由宾夕法尼亚大学Valley Forge研究中心B.D.Steinberg 教授主持,研究出一种称为"大天线阵列微波成像(或称无线电摄像机)"的技术。它以自适应数字波束形成(ADBF)为核心,采用大天线接收阵列(或合成孔径阵列、逆合成孔径阵列)技术获得高角分辨力,毫微秒级射频脉宽技术获得高距离分辨力,从而获得目标高分辨力二维雷达图像。九十年代初报告的3cm波长设备在费拉德尔非亚国际机场民用飞机飞行试验结果表明,该技术是成功的,目前正在向工程应用方面发展。
国内成像雷达涉及领域与国外相当,已有一些技术储备,个别设备(如航天部二院23所的机场ISAR试验系统、成都电子科大的毫米波高炉料面成像系统和西安电子科大的稀布阵成像等)接近或达到了工程应用状态。在无线电摄像机体制微波成像领域,成都电子科大八十年代末开始研制,九十年代中后期研制成功大阵列成像试验系统,在成都国际机场试验结果表明,ADBF技术在靶场小截面高速多目标跟踪测量领域具有非常重要的应用前景。本文通过靶场需求和关键技术的分析,在一些简单的边界条件下进行工程仿真,获得了一种可行的应用方法。
2 靶场需求
目前,靶场急需多目标战术导弹(V≥6 Ma、σ≈0.1m2、H≤10m、n≥8)的测量设备,用以提供目标弹道参数,获得目标实时轨迹。利用雷达跟踪通道实现对目标的粗略跟踪,成像通道实现对目标的全天候微波成像并对实时轨迹进行精密测量。
成像雷达一方面提供高精度的多目标坐标,另一方面提供操作人员识别的目标基本牲、特征(如目标轮廓等)。与此相关的首要问题是界定雷达在相应距离的分辨率要求。分析靶场测量需要并考虑工程实施的可行性,提出如下参数:距离分辨率:≤1.5m,角度线分辨率:≤4m(距离≤30km);≤3m(距离≤20km);≤1.5m(距离≤10km)。
3 跟踪与测量
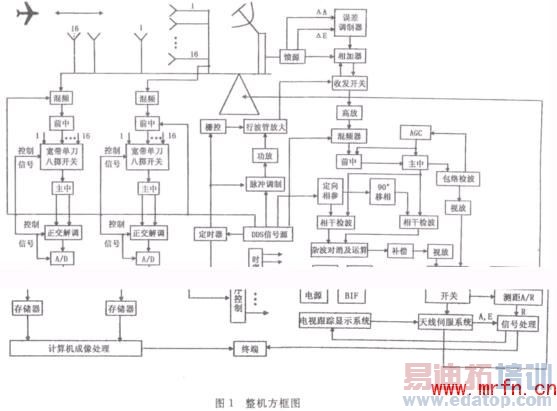
为实现对多目标的连续成像测量,必须对目标进行连续跟踪。由此,可以拟出系统的简化框图(见图1)。
3.1 目标跟踪过程
以频综产生的定时触发脉冲为基准,发射机产生全相参高频大功率脉冲信号,经收发开关、合成电桥、多模馈源和发射天线,完成路-场-波转换,向空中发射电磁波。
当电磁波遇到空中目标时,产生后向散射信号,被天线接收,经过比较器形成和信号、方位差信号和高低差信号,其中差信号移相后相加形成合成差信号,由扫描调制送到合成器与和信号相加输出,经收发开关、微波放大,在混频器与本振信号混频得到中频接收信号。
正常跟踪时,接收机输出视频信号,分别送到距离跟踪系统和角伺服系统,完成对目标的自动跟踪。
当目标进行超低空飞行时,系统必须在杂波背景下对运动目标进行跟踪。这时,接收机输出中频信号,与频综中频信号相参,检出零中频信号,送信号处理系统,经杂波相消运算补偿回送接收机,归一化处理后再输出测角、测距信息。
3.2 目标成像过程
目标成像过程主要有两个步骤:信息的获取和成像。
目标信息获取过程:发射机发射一个微波脉冲信号照射成像区域,在这个区域内的所有目标回波信号被所有接收阵列天线单元接收,经过混频、放大、解调、A/D变换和存储获得目标回波的数字信号。
目标成像过程:获得的目标回波数字信号经过自适应数字波束形成,校正存在于各接收通道回波信号之间的随机相位误差而形成接收波束,聚焦使接收波束对成像区域扫描,从而获得各个目标的图像。
3.3 目标测量过程
大阵列微波成像系统(无线电摄像机) 使用独特的自适应波束形成技术,充分补偿了由于大型阵列天线的阵元位置误差、电波传播、系统内部噪声等所造成的相位误差,形成窄波束,获得高的目标角分辨率。另一方面,纳秒级脉宽可获得高的距离分辨率。因此,目标实时轨迹测量值应当在相应时刻所成微波图像中获取。
4 威力及精度仿真
4.1 仿真基础
仿真过程中,要充分考虑工程实施的需求,在边界条件选取时,要留下误差余量。
目标雷达截面积的选取有3种方式。考虑战术导弹直径约400mm、长约7m,无论有无侧翼尾翼,近似视其为圆柱反射体是合适的。对于尺寸大于波长的圆柱体,其轴线垂直于雷达视线时,雷达反射截面积为:

4.2 检测因子
跟踪通道:战术导弹运动起伏是较快的,假定为Swerling III型较为合适,即在脉间视为相关,而在扫描周期内是不相关的。跟踪时所需的检测因子可由跟踪误差指标来分析。对于距离和角度,跟踪的潜在精度经典公式为:

成像通道:由于采用了特殊校正技术,所以需要在成像对象上寻找孤立点目标作相位校正的参考源。通常,只要物体上某点回波功率比其它各点回波功率的总和大4.3dB,该点即可视为孤立点目标。有研究表明,在任何物体上均可找到这种参考源。
作用距离:跟踪雷达最大作用距离以S/N=0dB计算

测量精度:由于成像所采用的ADBF技术,消除了常规雷达中影响精度的许多因素,因此,实时轨迹的距离及角度测量精度为:

4.3 仿真结果
根据可实现的基础工业条件,由计算机雷达系统仿真,可获得系统基本参数:RCS为0.15m2,作用距离为89km,成象距离31km,测距均方差σR=1.48m,测角均方差 σA,E=0.097mil。
5 关键技术
杂波抑制: 目标运动具有超低空特性(Hmin≤25m),回波中有很强的地杂波,必须应用 MTT 技术才能使雷达进行精密跟踪。
采用多谱勒技术消除地杂波影响的同时,要考虑到假单脉冲角度误差调制的频率特性。地杂波谱为高斯谱,在σVσc=2σV/λ= 20Hz。因此,角误差调制频率应大于地杂波滤波器的阻带宽度,即大于20Hz。 =0.32m/s时,其均方根谱宽为:
跟踪通道中,由于存在多谱勒滤波器频响特性的附加调制,在提取角误差信号时,幅度应作二次归一化处理。
复合控制: 战术导弹的发射特点是速度从"零"开始变化越来越大,具有大的角度变化梯度,只采用位置闭环跟踪会产生很大的滞后量,角速度还不是很大(如ω≥10°/s),就容易丢失目标。为了适应高角速目标的精密跟踪,必须采用复合控制技术,即利用计算机测速,在位置环中迭加进速度环。
MTT技术的应用,要求角伺服系统具有相应的相位修正措施。
双极化: 微波成像雷达应用ADBF技术,用单个脉冲成像等效于无线电照相,一个重要的条件是发射和接收的波束必须能全部覆盖目标。
为了兼顾作用距离、目标覆盖和工程设计简化问题,跟踪天线采用双波束收发,成像阵列接收天线采用单波束。
双波束形成技术较多,较为简单的方法是由测距系统自适应电控相移实现变极化,在远目标区形成高增益锐波束,在近目标区形成宽波束。
高速距离跟踪:雷达跟踪的目标最高速度达 6马赫,即2040m/s。因此,距离跟踪必须采用高阶递归反馈系统、速度增益自适应技术、环路带宽自适应技术。当采用模糊系数自适应控制二阶卡尔曼滤波器时,跟踪速度由下式估算:

取k1=0.20,T=3ms,τ= 0.6μs,算出Vmax≤6000m/s。
成像:无线电摄像机是采用微波全息成像法进行目标测量的。通过对目标衍射场的测量,并对所测得的衍射场信息(包括衍射波场的幅度和相位信息)进行处理来获得目标图像,即复现目标的散射函数的模|S(P)|。由于使用毫微秒脉冲技术和大阵列技术,使测量的目标诸元值具有很高的精度。二维成像由表1给出具体步骤。

无线电摄像机采用一个发射天线发射射频脉冲信号照射目标空间,用一个大的天线阵列接收目标回波信号,然后通过自适应(数字式)波束形成(Adaptive Beam Forming-ABF)技术对各接收阵元所接收的信号数据进行自适应反馈控制,自适应地调整各个天线阵元接收信号的复加权系数,补偿由于天线阵元的几何位置、环境及电路等引起的相位差异,从而形成一个极窄的波束,再如同通常相控阵一样改变各加权系数(按线性变化把相位加到相应接收信号的数据上),使用一个波束对空间扫描,从而获得目标的高分辨率图像和精确的参数测量。输出信号的大小等于目标的散射函数值,对位于其视场内的所有目标只需要发射一个脉冲即可以完成对目标的成像和测量的目的,因此能够对高速运动的多目标进行成像测量,见图2。
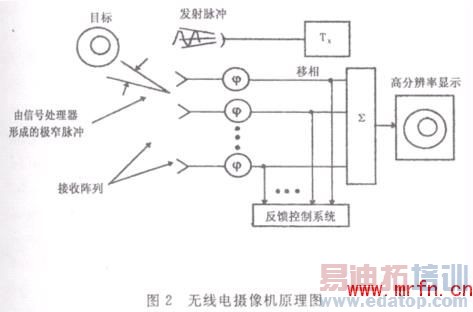
自适应数字式波束形成(ADBF)技术是在信号处理的过程中,信号处理机(计算机)按一定的准则(例如:回波幅度方差最小等),自动搜索空间点目标(或类似点目标)的回波,以此信号为基准对阵列接收的全部信号进行移相,达到补偿相位误差的目的而使其相同,从而自适应形成回波。主要步骤有:观察控制、数据收集、数据预处理、信号处理(STEP1:幅度校正,STEP2:波束形成, STEP3:扫描)、图像显示和目标测量。
成像与跟踪通道的隔离:对于跟踪通道,作用距离应尽量远,选用的脉冲宽度在μs量级。而成像通道,主要是解决高分辨率问题,选用的脉冲宽在ns量级。两通道的信号带宽相差十多倍。为了简化工程设计,利用信号的时域和频域特性,在一个物理通道中形成相互隔离的两个信号通道。其过程如下:
首先,在DDS信号源中形成以ft1与ft2(均为1.5kHz)交替发射的射频信号ft(合成射频重复周期为3kHz),并使交替发射的射频信号差ft1-ft2≥500MHz。
选择相差100MHz的两个中频及两个相应信号带宽的滤波器。成像信号在跟踪通道的滤波器通带外衰减到几乎为零,同样,跟踪信号在成像滤波器的通带外衰减到几乎为零。使其形成两个互相隔离的信号通道。
6 结束语
经过工程仿真,结果说明研制微波成像雷达是可能的。对于关键技术,国内均有基础储备。高性能DDS信号源、杂波抑制、复合控制、双极化、高速距离跟踪、通用计算机雷达终端、超低空(从地面运动目标开始)精密跟踪等技术,目前已有成功经验。成像阵列实现、成像算法技术等97年底研制的工程样机,在双流机场试验获得成功。因此,现在研制靶场用成像雷达是完全可行的。
张华生 1955年生,高级工程师,中国电子学会雷达委员会委员,国务院政府特殊津贴专家,中华全国总工会五一劳动奖章获得者。主要从事雷达系统技术研究工作。