- 易迪拓培训,专注于微波、射频、天线设计工程师的培养
一种传感器测试系统的实现
录入:edatop.com 点击:
一、前言
在进行热对流式加速度传感器性能试验中,需进行离心机转台试验和高低温试验。前者利用大型离心机产生的离心加速度变化检验传感器的动态特性,后者将传感器系统放置在高低温试验箱中,并利用可操纵的俯仰转台检测传感器在不同环境温度下的灵敏度变化和温飘。采用遥测技术可有效避免因为长导线带来的干扰和信号畸变。为实现这一功能,研制了用单片机和射频器件构成的遥测系统。
二、系统的总体设计
遥测发送端采用单片机测量传感器输出,并将测量结果通过射频器件进行无线传输。在离心机试验中,需要动态测试传感器在离心机加速过程中感知到的离心加速度变化,并将测试结果发送出来。在高低温试验中,需要获得传感器在不同温度下的动态输出,为在高低温箱中提供动态变化的加速度环境,利用遥测系统来控制步进电机转台快速改变倾角,可以获得0~1g范围内的加速度变化。为驱动步进电动机工作,专门为步进电机设计的环形分配器和功率驱动器电路。
控制与接收端采用单片机和射频器件进行控制信号的发送与遥测信号的接收,接收到的数据通过RS232串口传送到PC,PC上运行数据获取与处理程序。
系统框图如图1所示。
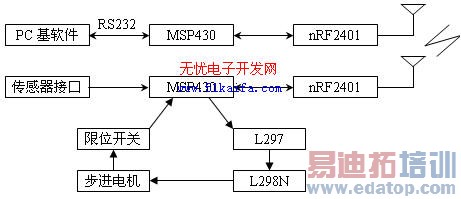
图1 传感器遥测系统原理框图
三、系统的硬件构成
3.1 被测传感器简介
被测试的热对流传感器是基于CMOS造工艺制造的加速度传感器,它以可移动的热对流小气团作为重力块,通过测量由加速度引起的内部温度变化来测量加速度。由于其质量块是气体,不存在电容式传感器所存在的粘连等问题,更能抗50,000g 以上的冲击。同时该传感器输出为占空比正比于加速度的PWM信号,便于后续处理。
3.2 测控系统使用的单片机
MSP430单片机是德州仪器推出的低功耗单片机,具有工业级16位RISC,其I/O和CPU可以运行在不同的时钟下。CPU功耗可以通过开关状态寄存器的控制位来控制:正常运行时电流160μA,备用时为0.1μA,功耗低, 为设计低功耗系统提供了有利的条件。无线测控系统采用MSP430单片机作为控制器可以显著地降低控制端和遥测端的功耗。
3.3 传感器输出信号的测试
利用传感器可输出PWM信号的特性,通过精确测量信号的占空比即可测得传感器输出的加速度量值。本系统所测试的热对流传感器输出加速度信号为100Hz的矩形波,矩形波的占空比随其敏感的加速度幅值从50%起线性增加。利用单片机的定时器可以方便地测量矩形波的占空比。
3.4 射频器件nRF2401
Nordic VLSI公司的单片无线收发芯片nRF2401内置地址解码器、先入先出堆栈区、解调处理器、时钟处理器、GFSK 滤波器、低噪声放大器、频率合成器,功率放大器等功能模块,所需外围元件很少。采用QFN24引脚封装,外形尺寸只有5×5mm。该芯片工作在2.4~2.5GHz的ISM频段上,典型输出功率为0dBm,接收灵敏度为-90dB,无线传输距离可以达到200m,收/发半双工方式工作,总共125个频道,ShockBurstTM工作模式下收/发速率可达1Mb/s,而模块与MCU的数据交换速率则可以低速进行,减少了无线电波发射时间、降低了能耗,也降低了对MCU的速度要求。
3.5 步进电机转台的驱动
由于测量范围并不要求倾斜角度变化的分度非常细密,选用成本较低的两相步进电动机42BYG121,其步进角为1.8度,通过半步驱动方式进行细分可获得0.9度的步进角;环形分配器和电机驱动器选用L297和L298N芯片,由L297将单片机给出的连续脉冲转换成步进电机所要求的相绕组脉冲序列;再由L298N对相脉冲信号进行放大,驱动步进电机转动。
四、主要接口与编程实现
4.1 nRF2401的接口与编程
nRF2401的典型应用电路图如图2所示。nRF2401 有四种工作模式:收发模式、配置模式、空闲模式和关机模式。nRF2401 的工作模式由PWR_UP 、CE、TX_EN 和CS 三个引脚决定。对nRF2401的操作主要是配置其工作方式和读写数据,所有配置命令字和数据都是通过同步串行口的CLK和DATA两个引脚完成的。
要将nRF2401设置于ShockBurstTM方式,首先使PWR_UP 引脚为高电平,CE 引脚为低电平。配置字从最高位开始,依次送入nRF2401,CLK下降沿锁定数据。配置命令字发送完后,在CS的下降沿按新配置字的设置开始工作。
使用nRF2401进行发送数据时,采用以下的步骤:
(1)CE置高,使nRF2401开始工作;
(2)逐位写入接收机的地址;
(3)逐位写入要传送的数据;
(4)CE 置低,激发nRF2401进行ShockBurstTM发射。
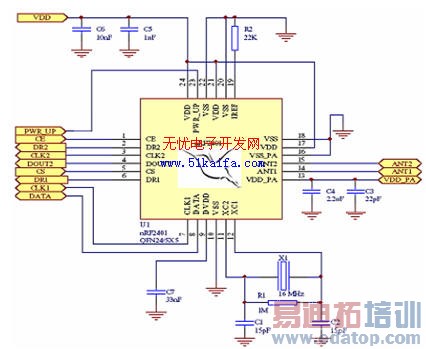
图2 nRF2401典型应用电路图
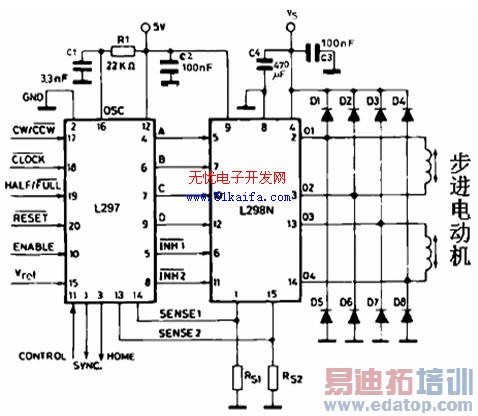
图3 L297/L298N组成的应用电路
nRF2401的ShockBurstTM发射过程是:给射频前端供电,射频数据打包(加字头、CRC 校验码),高速发射数据包,发射完成,nRF2401进入空闲状态。
nRF2401的接口模块引脚包括CE、DR1、CLK1 和DATA(接收通道1),接收端依照以下流程进行数的接收:
(1)配置本机地址和要接收的数据包大小;
(2)进入接收状态,CE置高;
(3)200us后,nRF2401进入监视状态,等待数据包的到来;
(4)当接收到正确的数据包时,nRF2401自动除去字头、地址和CRC;
(5)nRF2401通过把DR1(可用作中断信号)置高通知微控制器;
(6)微控制器把数据从nRF2401逐位移出;
(7)所有数据移完,nRF2401把DR1 置低,此时如果CE为高,则等待下一个数据包,如果CE为低,开始其它工作流程。
4.1 步进电机驱动器的接口与编程
环形分配器L297的核心是脉冲分配器,它可以产生三种相序信号,对应于三种不同的工作方式:半步方式,一相激励方式,两相激励方式。它接收来自控制器的信号有: CW/ CCW 正/反转(17脚),HALF/ FULL 半步/基本步距(19脚),STEP 步进脉冲(18脚)。为了在现有硬件基础上达到最佳的使用效果,步进电机按半步方式运转。
功率电路选用功率放大器L298N,是一种H型双极性驱动器,D1~D4四个二极管组成桥式续流回路。使用上述H桥功放,每相绕组必须用一个H桥。L298N为双H桥高电压大电流功率集成电路,可用来驱动继电器、线圈、直流电动机和步进电动机等电感性负载。L297步进电机控制器与L298N双H桥驱动器组成典型的集成步进电机微控制器。其连接电路如图3所示。其中8个二极管D1~D8为与L298N芯片及步进电动机连接,组成H桥的续流电路。
五、传感器遥测系统的实现
接收控制端PC程序使用VB编程,利用MSCOMM控件实现对串口的操作。无线通讯模块程序框图如图4左图所示。
传感器测试与测试结果数据发送端程序框图如图4右图所示。
利用本文所介绍的传感器遥测系统,顺利完成了热对流式加速度传感器的离心机试验和高低温环境试验。
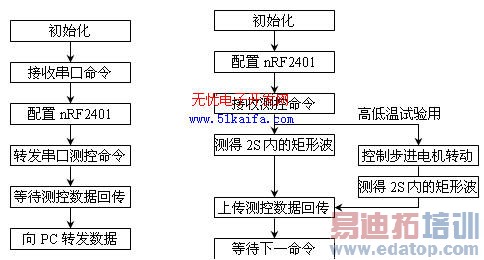
图4 测控系统软件流程图
本文作者创新点
本文利用射频器件实现了热对流传感器试验系统的遥测功能,为军品器件进行环境试验带来了极大的便利,该系统同样可用于其他类似的应用场合。
参考文献
[1] 谭建成主编.电机控制专用集成电路.北京:机械工业工业出版社,1997.7
[2] 黄智伟.射频集成电路芯片原理与应用电路设计.北京: 电子工业出版社,2003
[3] 王羲,董燕飞. 步进电机转台的控制[J]微计算机信息.2005.02,29~30
[4] 胡大可.MSP430 系列FLASH 型超低功耗16 位单片机.北京:北京航天航空大学出版社,2002

